

Crustal movements of the eastern Honshu offshore MS7.2 earthquake in Japan in 2016
-
摘要:
2016年11月22日日本本州东岸近海发生东日本MW9.0大地震的MS7.2强余震。本文利用美国内华达大学内华达大地测量实验室网站获得此次大地震周围共30多个GPS连续观测站及其它台站的IGS08全球参考框架坐标时间序列,采用北京附近的GPS连续观测站BJSH作为区域位移参考框架的核心站,获取了此次MS7.2强余震的同震水平位移和区域参考框架位移时间序列,得到了此次强余震前后的位移时空变化图像。结果显示:尽管本州东岸近海MS7.2地震作为东日本MW9.0地震的强余震,受其震后形变的影响强烈,但其地壳水平形变的前兆规律与已观测到的大地震一致;不同的是东日本MW9.0地震前的垂直位移无积累,而本州东岸近海MS7.2地震前后的垂直位移保持MW9.0地震后均匀而缓慢的衰减变化;临震前震中附近的GPS连续观测站的东西分量明显减速,有的甚至减至零,是明显的短期前兆异常。此外,本文还进一步讨论了两种同震位移及其成因,并推断地壳水平运动挤压是此次地震的成因。
-
关键词:
- GPS /
- GNSS /
- 地震前兆 /
- 2016年日本本州东岸近海MS7.2强余震 /
- 同震位移
Abstract:In Japan, on November 22, 2016, occurred the eastern Honshu offshore MS7.2 earthquake, which was the aftershock of the 2011 Tohoku MW9.0 earthquake. Time series of coordinates of a large number of GPS stations in the world are available at the website of the Nevada Geodetic Laboratory of the Nevada University. Based on the time series of coordinates in the global reference frame of IGS08 at more than 30 stations of continuous GPS observations, downloaded from the website and with the station of continuous GPS observation BJSH near Beijing used as the core station in the regional reference frame, the coseismic displacements and time series of horizontal displacements before and after the earthquake are analyzed in time and space. The results show, though the eastern Honshu offshore MS7.2 earthquake, as the aftershock of the 2011 Tohoku MW9.0 earthquake, was intensely affected by the postseismic crustal deformation of the main shock, the precursory horizontal deformations were in good agreement with those of other large earthquakes. The prominent feature of the Tohoku earthquake is that there was no significant preseismic vertical displacement accumulation, whereas the vertical displacements before and after the eastern Honshu offshore MS7.2 earthquake show slow and uniform decaying as those after the main shock. Shortly before the earthquake, the stations of continuous GPS observations near the epicenter showed significant decrease in velocities or even zero as for the east component, which were short term precursory anomalies. Moreover, two types of coseismic displacements and their cause were discussed, and the horizontal compression in the crust was the cause of the aftershock.
-
引言
高精度重力梯度测量作为一种新兴的地球物理探测技术,不仅在海洋重力辅助导航、 海底潜艇探测和海底资源勘探等领域具有重要意义(徐遵义等,2007; DiFrancesco et al,2009; Araya et al,2011),而且在陆地资源勘探、 大型水库监测和水底坑洞探测等领域也是一种有效的地球物理探测技术(王谦身,2003; Woolrych et al,2015). 此外,航空和卫星重力梯度测量在地球重力场等基础科学研究领域也具有重要的作用(宁津生等,1996,2002).
自1971年美国空军首次提出精度为1 E的移动级重力梯度仪以来,高精度重力梯度仪的研究得到了迅速发展,其主要设计原理为差分加速度计和扭矩测量. 基于差分加速度计的航空重力梯度仪,由于其自身的高稳定性和高精度得到了迅速发展和应用(李红军等,2002; 刘凤鸣等,2009),但大部分还处于实验样机阶段,目前唯一定型的商用重力梯度仪是美国贝尔实验室研制的旋转加速度计重力梯度仪(DiFrancesco et al,2009). 基于扭矩测量的重力梯度仪,由于体积和稳定性问题,其发展受到了限制. 彭益武等(2006)设计的基于扭矩测量的二维簧片重力梯度仪在体积和稳定性等方面取得了突破. 另外,超导重力梯度仪由于其测量精度、 体积和整体质量等方面的优势,越来越多地被应用于航空重力测量中(吴琼等,2013),具有非常好的发展前景(Moody et al,2002).
上述各类梯度仪的设计原理均属于相对测量,需要对参考坐标及变化的物理量进行标定,不适用于发射到宇宙外星球进行长期的内部质量分布探测研究,因此,在美国宇航局20世纪末的火星探测计划中,Micro-G公司开展了基于激光干涉原理的绝对重力梯度仪的研制,其测量精度的设计指标为1 E,其目的是探测火星的深部结构(Brown et al,1999; Robertson,2001).
受此启发,激光绝对重力梯度仪作为研究地球深部质量迁移的一种新型有效工具,更能满足地震的监测需求. 目前,我国差分加速度计的最高精度为10-6 m/s2,这与梯度仪要求的测量精度还有很大差距; 而现有的绝对重力测量技术的测量精度可达10-8 m/s2,完全能够满足重力梯度仪的精度要求(胡华等,2012; 滕云田等,2013),故基于创新设计及软件开发,利用激光干涉法完成地表重力垂直梯度测量的方案是完全可行的. 虽然目前该仪器的体积较大,但从固定台站观测的角度看,该缺点可以忽略; 而且随着激光干涉重力梯度仪研究的进一步开展,将来可以进行小型化设计,使之满足移动重力垂直梯度仪的测量需求.
本文拟基于激光干涉法对新型地表重力垂直梯度测量系统进行研究并初步构建原理样机. 该测量系统采用激光干涉原理,通过测定两个落体同步自由下落时相对于刚性连接的两个参考点的位置信息确定各自的重力加速度,然后通过差分计算得到测点的重力垂直梯度. 由于两个参考点为刚性连接,其感受到地面的振动信息完全相同,且两个落体利用同一套伺服控制系统,由振动引入的测量误差将在差分时消除,这样即可得到某测点的高精度重力垂直梯度值. 与其它重力梯度仪相比,激光干涉重力梯度仪具有以下优点: ① 有较大的测量范围,无需标定,无漂移; ② 地面振动属于共模误差,无需设计特殊的隔振系统,对动态测量非常有利; ③ 地面倾斜属于共模误差; ④ 对地球浅层异常质量体敏感.
1. 设计原理
1.1 基本原理
基于激光干涉法重力垂直梯度测量的基本原理是,当两个落体在一个真空舱中同步自由下落时,运动过程中所受到的干扰因素可以等效为一个合力,并且该合力对每个落体的作用均相同,唯一不同的是所受重力场重力垂直梯度的影响. 因此,通过解算垂直向间隔为h的两个落体(较高位置的为上落体P1,较低位置的为下落体P2)在真空中作自由下落运动时测量得到的干涉条纹,分析重建各自的自由下落轨迹(吴琼等,2012),并获取上落体P1在其有效测量高度href_U处的第一绝对重力加速度值gU和下落体P2在其有效测量高度href_D处的第二绝对重力加速度值gD,再根据下式得到单次下落的重力垂直梯度γ,即

(1) 图 1给出了重力梯度测量算法原理,主要是为了确定式(1)中的两个未知量href_U和href_D. 落体P1的初始位置为A00,其对应的初始速度和位移均为0,但在实际工作中一般将初始速度和位移无限接近于0的A0点作为其初始位置,在计算中近似认为A00与A0重合,因此hinst_U对应的是P1的初始位置. 在heff_U位置处,由于上落体P1在自由下落过程中所受到的重力梯度影响的综合效应为0,则测量得到的重力加速度值所对应的高度为

(2) 对于下落体P2,同样有

(3) ![]() 图 1 重力梯度测量算法原理Figure 1. Principle for the algorithm of the gravity vertical gradient measurement
图 1 重力梯度测量算法原理Figure 1. Principle for the algorithm of the gravity vertical gradient measurement在计算重力垂直梯度时,首先计算heff_U和heff_D,然后将式(2)和(3)代入式(1)求得最终测点的垂直向重力梯度值. 对于heff_U和heff_D,二者采用的推导过程相同,这里仅以heff_U为例进行说明:
1)设定初始条件. 考虑到重力垂直梯度的测量精度要求,在heff_U的计算过程中,其计算精度须精确到mm; 对于上落体P1,从初始位置A00到位置A0的下落运动过程为非自由下落运动,距离一般小于5 μm,时间小于30 ms. 这段非自由下落运动过程对heff_U值的影响在误差允许范围内,因此在计算中可被忽略. 也就是说,假设上落体在t00时刻从初始位置A00开始进入自由下落运动,则t0=0,v0=0,x0=0; 初始位置A00的绝对重力加速度g0为已知设定值. 此外,(t1,x1)和(tn,xn)已根据所获取的干涉信号解算得到.
2) 落体的自由下落运动方程为

(4) 根据假设的初始条件,解上述方程,可得

(5) 由于gU是t1—tn时段内重力场平均作用于上落体P1的结果,则其表达式为

(6) 将式(5)代入式(6),得

(7) 又由于gU为某个位置的绝对重力加速度值,将与其对应的位置记为C,则初始位置A00到位置C的距离记为heff_U,则

(8) 对比式(7)与式(8),可得到

(9) 由式(9)可知,在利用同一套落体伺服控制系统对上、 下落体进行同步控制的过程中,heff_U与heff_D在对应的开始时间t1和结束时间tn的取值完全相同,即heff_U=heff_D,故将式(2)和式(3)代入式(1),得

(10) 即利用式(1)进行重力垂直梯度计算时与g0的选取无关,仅取决于上、 下落体自由下落时重力加速度的计算和结构设计时所确定的两个落体光心之间的距离. 结构设计过程中,设上、 下落体光心间的水平距离为95 mm,若水平梯度按300—500 E(朱英,李卢玲,1982)计算,梯度测量误差为3—5 E,而本套梯度测量系统精度为100 E,因此水平梯度引入的误差可以暂时忽略,故式(1)中上、 下落体的光心间距即为上、 下落体光心间的垂直距离.
1.2 光路设计
激光干涉法重力垂直梯度测量系统的光路设计如图 2所示. 可以看到,激光器发出激光束入射至分光镜BS1的上表面,分别得到BS1上表面透射和反射两束同源激光,透射光入射至分光镜BS2的上表面,反射光经反射镜M反射后入射至分光镜BS3上表面. 分光镜BS2、 下落体P2和参考镜MS2等构成下落体P2的干涉测量光路,所形成的干涉条纹利用雪崩光电二极管(advanced photo diodes,简写为APD,下文分别用APD1和APD2表示上落体P1和下落体P2自由下落时形成的干涉条纹的接收器)接收并转换为电压信号被后端的高速数字化仪接收; 分光镜BS3、 上落体P1和参考镜MS1等构成P1的干涉测量光路,形成的干涉条纹被APD1接收并转换为电压信号被后端的高速数字化仪接收(吴琼等,2011).
![]() 图 2 干涉法重力梯度测量原理Figure 2. Measuring principle of the gravity vertical gradient based on interferometry
图 2 干涉法重力梯度测量原理Figure 2. Measuring principle of the gravity vertical gradient based on interferometry这套装置中,激光器、 分光镜(BS1,BS2,BS3)、 反射镜(M)、 参考镜(M1,M2)和光电接收器(APD1,APD2)均为刚性连接,真空舱中的P1和P2在同一套伺服电机控制系统作用下作自由下落运动,因此APD1和APD2接收到的干涉条纹所受到的地震动、 真空度、 气压、 极移和潮汐等环境干扰均保持相同. 源自这些因素的误差在测点重力梯度的差分计算时将被自动消除,不会影响最终测量结果的精度.
2. 测量系统设计
2.1 双落体伺服控制系统结构设计
基于激光干涉法的重力垂直梯度测量系统是利用一套电机伺服控制系统控制垂直方向间距为50 cm的两个落体作同步自由下落运动,故需要构建一个如图 3所示的真空系统,为落体的自由下落提供高真空环境,并为双落体伺服控制系统提供机械支撑.
真空系统安装在由3个支撑腿支撑的角架上,其中心旋转轴通过角架的质心,以确保角架完成水平调节后,真空系统的中心旋转轴为竖直状态. 该系统由上盖、 上二通底座、 上真空舱、 下真空舱和下二通底座等构成. 由于真空系统腔体较大,在构建真空环境时将分子泵直接安装在下二通底座上,并将其预抽至2×10-4 Pa以上时打开离子泵阀门,维持真空腔体内真空度优于5×10-4 Pa,满足落体自由下落对真空度的要求.
图 4为图 3所示真空系统内部安装的落体伺服控制系统. 图 4a显示的是落体伺服控制系统的整体结构,电机的输出力矩通过大气侧齿轮组和过真空传动机构驱动真空侧的齿条带动双落体作上下往复运动; 齿条经齿条运动导座约束后,可确保其沿竖直方向上下运动. 上托架内放置上落体P1,齿条通过万向联轴节驱动上托架,上托架沿上导轨作上下往复运动,对于下落体P2的驱动也采用同样的控制方式. 图 4b所示结构是为保证上、 下落体驱动的同步性而进行的特殊设计,由连接板、 连接块、 连接柱以及万向联轴节等构成. 连接板通过4个螺钉与上托架底端固定,末端与连接块固定; 连接块通过螺母锁定连接柱,三者构成“7”型结构; 连接柱通过万向联轴节与下托架固定. 该设计不仅可以保证上、 下托架在电机驱动下同步运动,还可抵消安装误差和制造误差所造成的径向力作用,使整套控制机构运行平稳可靠.
![]() 图 4 落体伺服控制系统设计(a)安装在真空舱内的落体伺服控制系统设计;(b)上、 下落体间刚性连接机构设计Figure 4. Design of the free-fall body servo control mechanism(a)Design of the free-fall body servo control mechanism in vacuum chamber;(b)Design of the rigid linkage between the up and down free-fall bodies
图 4 落体伺服控制系统设计(a)安装在真空舱内的落体伺服控制系统设计;(b)上、 下落体间刚性连接机构设计Figure 4. Design of the free-fall body servo control mechanism(a)Design of the free-fall body servo control mechanism in vacuum chamber;(b)Design of the rigid linkage between the up and down free-fall bodies2.2 双光路干涉测量系统设计
双光路干涉测量系统首先通过两个干涉光路测量单元分别采集上落体和下落体在自由下落过程中形成的激光干涉信号,再通过对其解算和差分运算得到地表重力垂直梯度.
依据图 2所示的测量原理设计双光路干涉测量系统的机械结构,如图 5所示. 激光器采用碘稳频激光系统,波长稳定度可达10-12,为整套测量系统提供长度基准. 高速数字化仪的时间基准由外部铷原子时钟提供,铷原子时钟输出频率的稳定度可达10-11,为整套仪器提供时间基准.
![]() 图 5 双光路激光干涉测量系统机构设计Figure 5. Design of the measuring structure of dual optical path measuring system based on laser interferometry
图 5 双光路激光干涉测量系统机构设计Figure 5. Design of the measuring structure of dual optical path measuring system based on laser interferometry干涉条纹的处理解算方面,由于上、 下落体自由下落的时间和位移信息可追溯到时间和长度基准,所以最后通过差分获得的重力垂直梯度值就具有了大动态范围、 无需标定和无零漂等特点; 构成双光路干涉测量系统所需的各个部件均刚性安装在双光路干涉测量系统的底板上,因此振动产生的误差属于共模误差,不会对最终的梯度测量结果产生影响.
光束垂直性调节方面,与激光干涉绝对重力仪不同,双光路干涉测量系统需要对两条测量光束进行垂直性调节. 首先,利用酒精液面提供的水平面和光学自准直仪,通过调整双光路干涉测量系统底板的支撑腿,调整入射上落体P1的测量光束的垂直性; 然后,同样利用酒精液面提供的水平面和光学自准直仪,通过调整反射镜M上的微调螺母,调整入射下落体P2的测量光束的垂直性. 这种调整方案的误差与光学自准直仪的误差相同,可以保证入射落体P1和P2的测量光束的垂直性误差小于0.2″.
2.3 测量系统构建与初步试验
目前,根据2.1和2.2节的设计已构建完成了一套可以正常工作的激光干涉法地表重力垂直梯度测量系统,如图 6a所示. 由于这套测量系统机构比较庞大,目前仅在实验室获取了初步的试验数据,如图 6b所示. 试验数据共有35组,每组进行16次测量.
![]() 图 6 激光干涉法地表重力垂直梯度测量系统(a)及其初步试验数据(b)Figure 6. The apparatus of the gravity vertical gradient measurement based on laser interferometry(a) and its preliminary test data(35 groups and 16 measurements per group)(b)
图 6 激光干涉法地表重力垂直梯度测量系统(a)及其初步试验数据(b)Figure 6. The apparatus of the gravity vertical gradient measurement based on laser interferometry(a) and its preliminary test data(35 groups and 16 measurements per group)(b)在落体自由下落过程中,选取0.045—0.130 s时段的干涉信号进行计算. 对应落体自由下落距离为1—8 cm,生成的干涉信号是调频正弦波,频率为1.4—4.0 MHz(吴琼等,2012). 考虑到采样频率引入的时间测量误差,选取采样频率为100 MHz,使得由采样引入的时间误差导致最终的测量误差小于1×10-8 m/s2.
图 7给出了单次测量中上落体自由下落时生成的干涉信号及其展开,可以看出,获取的干涉信号无明显干扰信号,信噪比高,可以满足高精度重力加速度值计算的要求.
![]() 图 7 实测上落体自由下落时得到的干涉条纹(a)及其展开(b)Figure 7. The interference fringes of the upper free-fall body during freely falling(a) and the expansion of the part of these fringes(b)
图 7 实测上落体自由下落时得到的干涉条纹(a)及其展开(b)Figure 7. The interference fringes of the upper free-fall body during freely falling(a) and the expansion of the part of these fringes(b)3. 讨论与结论
在重力垂直梯度的测量过程中,潮汐、 极移、 气压、 真空度、 温度梯度、 涡流以及参考棱镜的振动等相较于明显的误差源,在绝对重力测量时不会影响重力垂直梯度的测量结果,但双落体自由下落的同步性控制、 参考点以及各个光学部件间的刚性和双测量光路的垂直性等则是影响其测量精度的重要因素.
2012年至今,在原有设计研发激光干涉重力仪的基础上,初步完成了激光干涉法地表重力垂直梯度测量系统的原理研究、 结构设计和系统构建等,并获取了本套测量系统的第一批试验数据. 从图 7所示的干涉信号可以看出,本套测量系统获取的上、 下落体在自由下落过程中所产生的干涉信号的信噪比高,干涉条纹清晰完整、 无畸变,完全满足后期的计算要求. 图 6b显示的是本次试验完成的35组测量结果的组平均值,试验中每组设定的测量次数为16次,共完成560次测量. 对测量获得的35组平均值再进行求平均计算,确定本次试验样机测量的测点的垂直向重力梯度为2886 E,精度为99 E.
2012年11月曾利用两台拉科斯特相对重力仪对本次试验所在测点的重力垂直梯度进行测量,得到的梯度值为2402 E(精度100 E),对比分析初步确定本套梯度测量系统的测量准确度约为400 E.
本套梯度测量系统的精度和准确度不仅需要更多试验数据的测定,还需要制定更完备的测试精度和准确度的试验方案. 另外,针对伺服控制系统运行过程中的降噪问题、 数据处理算法和整套仪器的小型化设计等方面尚需进一步改进.
-
![]()
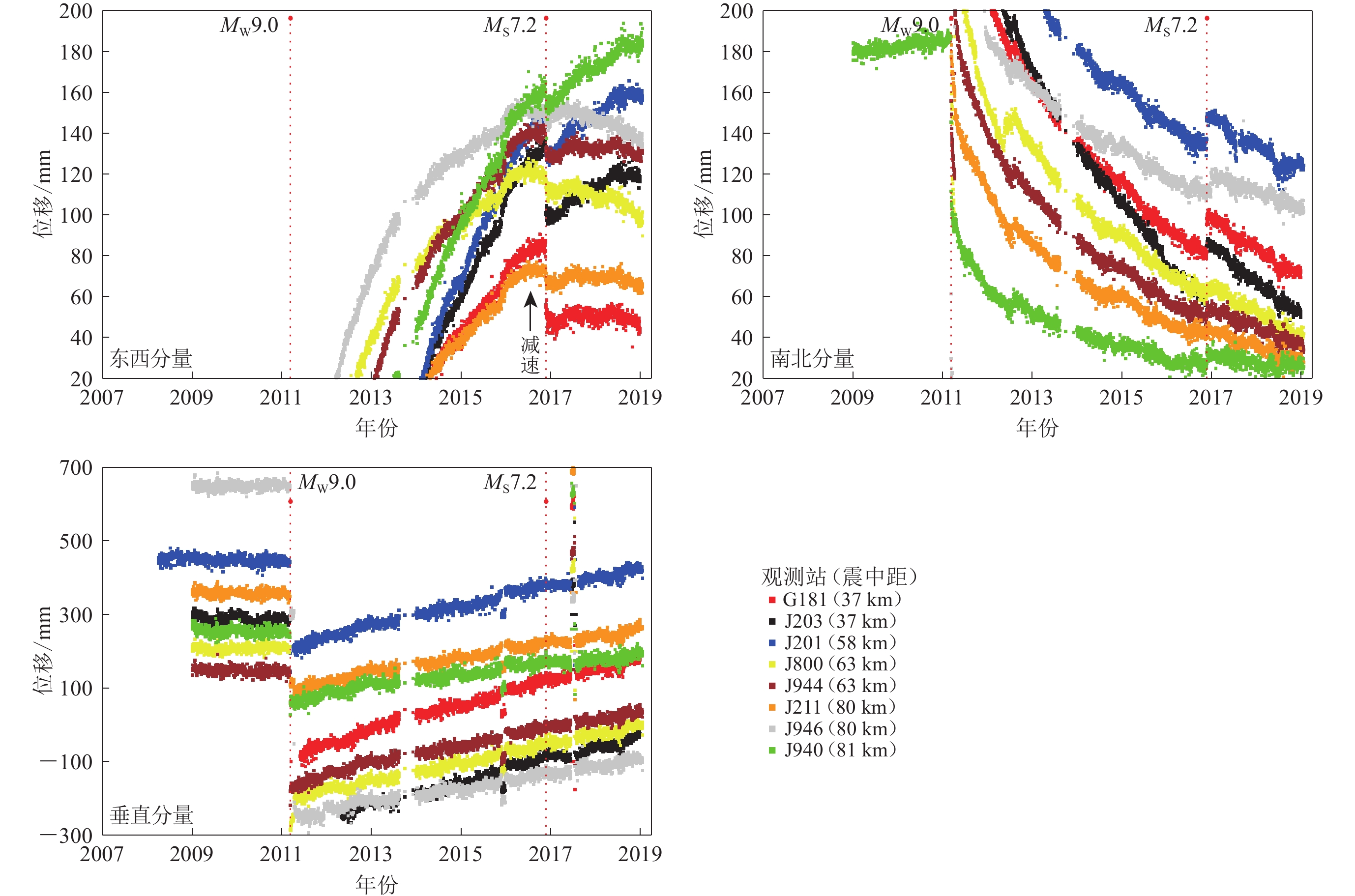
图 4 2016年11月22日(1924GPS周,周二)本州东岸近海MS7.2强余震前后震中附近8个GPS连续观测站的位移三分量时间序列
Figure 4. Time series of displacement components at eight stations of continuous GPS observations near the epicenter before and after the eastern Honshu offshore MS7.2 aftershock on November 22,2016 (Tuesday of GPS week 1924)
![]()
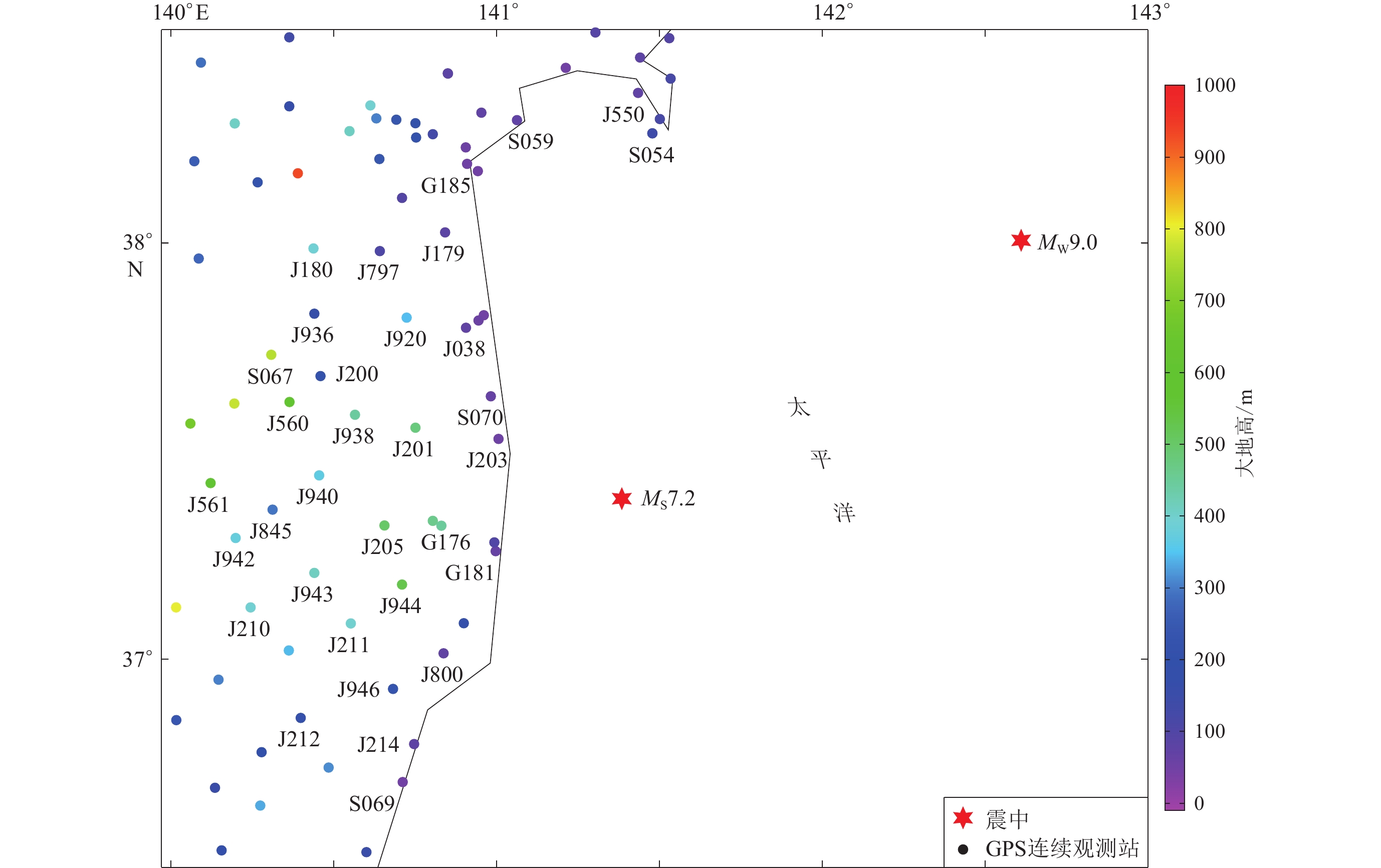
图 1 2016年日本本州东岸近海MS7.2余震及其主震震中位置和附近GPS连续观测站分布
图中标有代码的观测站为本文计算所采用
Figure 1. The eastern Honshu offshore MS7.2 aftershock in 2016 and its main shock of MW9.0 in 2011 in Japan as well as stations of continuous GPS observations near them
The stations marked with station codes are used in this study
![]()
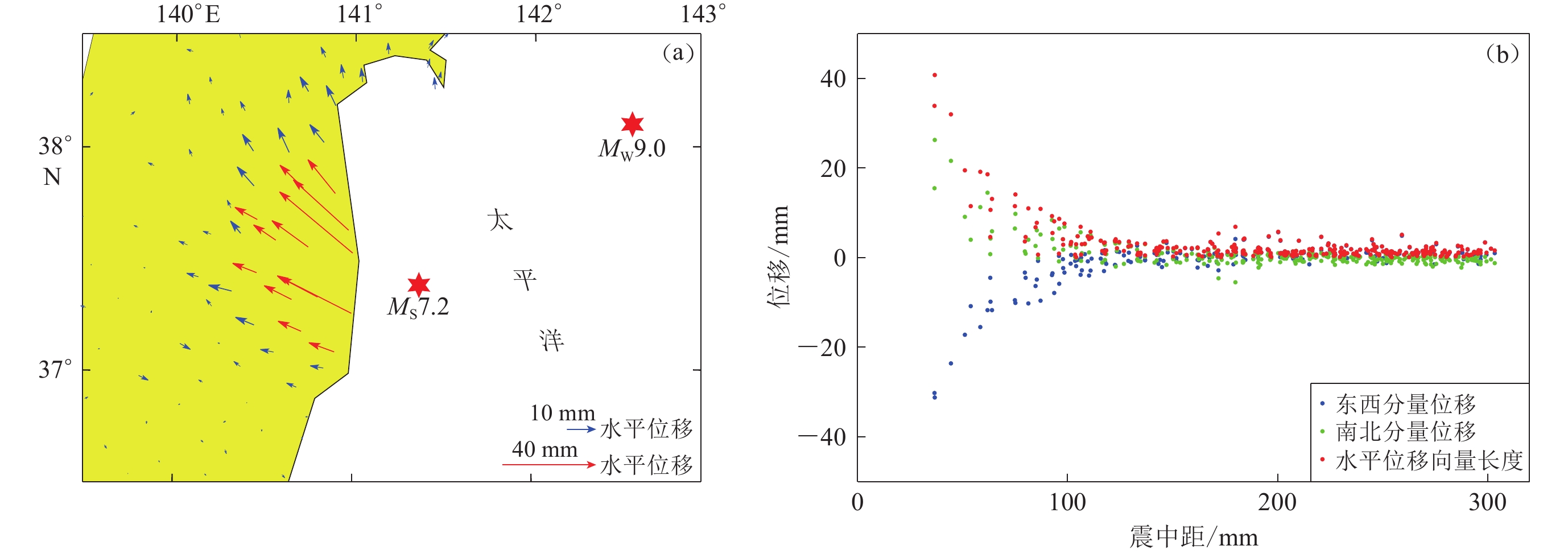
图 2 2016年日本本州东岸近海MS7.2余震的同震水平位移(a)以及各位移分量和水平位移向量长度随震中距的衰减(b)
Figure 2. Coseismic horizontal displacements for the eastern Honshu offshore MS7.2 aftershock in 2016 (a) and the decaying of coseismic displacement components with the epicentral distances (b)
![]()
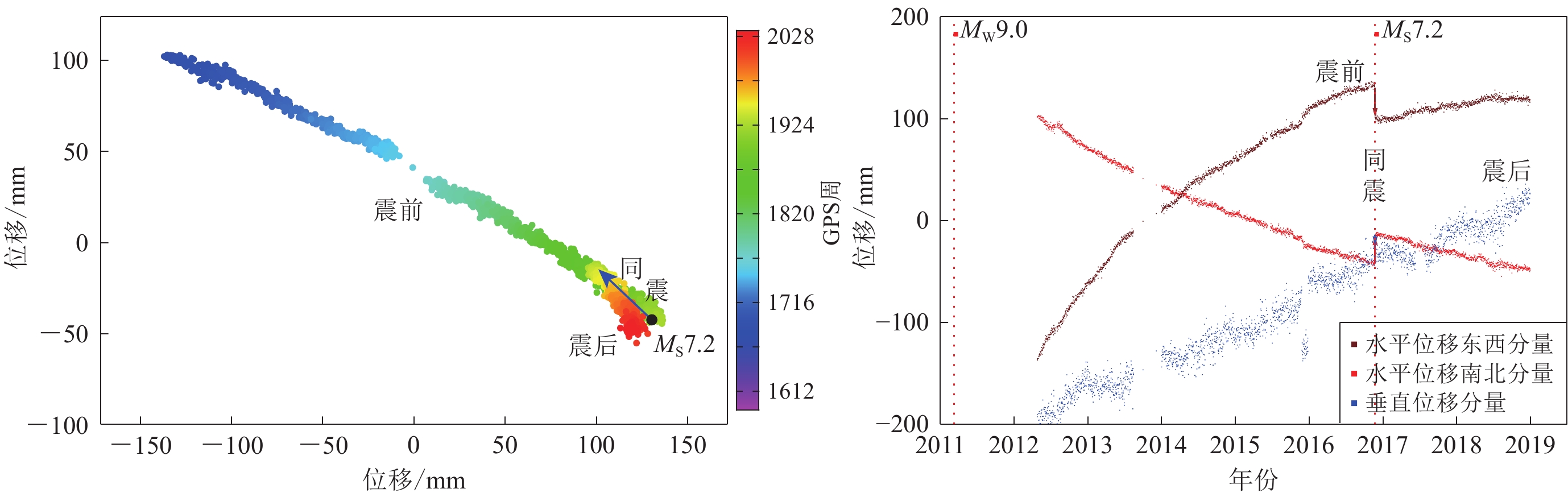
图 3 2016年11月22日(1924GPS周,周二)本州东岸近海MS7.2强余震前后GPS观测站J203的水平位移向量时间序列(a)和位移分量时间序列(b)
Figure 3. Time series of the horizontal displacement vectors (a) and three components displacement at the station J203 (37 km away from the epicenter) of continuous GPS observation before and after the eastern Honshu offshore MS7.2 strong aftershock on November 22,2016 (Tuesday of GPS week 1924)
![]()
图 5 东日本MW9.0大地震前后GPS连续观测站TSKB记录到的同震水平位移的分解
Figure 5. Decomposition of the coseismic horizontal displacement vector of the Tohoku MW9.0 earthquake recorded at the continuous GPS observation station of TSKB in Japan
![]()
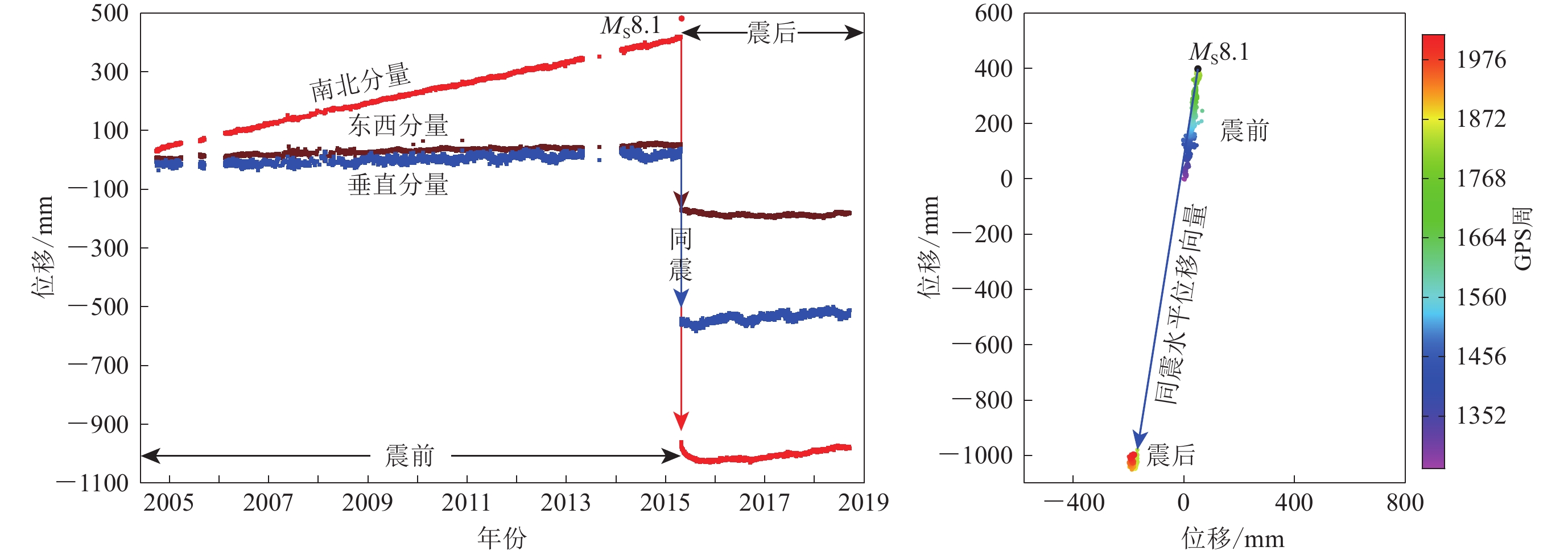
图 6 2015年4月25日(1841GPS周,周六)尼泊尔MS8.1地震前后距离震中60 km的GPS连续观测站CHLM位移三分量及同震水平位移向量时间序列
Figure 6. Time series of displacement components and the horizontal displacement vector at the station CHLM of continuous GPS observation,60 km away from the epicenter,before and after the Nepal earthquake of MS8.1 on April 25,2015 (Saturday of GPS week 1841)
-
顾国华,王武星,孟国杰,徐岳仁. 2009. GPS 测得的汶川大地震前后的地壳运动[J]. 武汉大学学报(信息科学版),34(11):336–1339. Gu G H,Wang W X,Meng G J,Xu Y R. 2009. Crustal movements before and after the Wenchuan earthquake as detected by GPS observations[J]. Geomatics and Information Science of Wuhan University,34(11):1336–1339 (in Chinese).
顾国华. 2012. GPS: 地震预测利器[M], 北京: 北京大学出版社: 130−150. Gu G H. 2012. GPS: Useful Technique for Earthquake Prediction[M]. Beijing: Peking University Press: 130−150 (in Chinese).
顾国华,王武星,占伟,梁洪宝,朱爽. 2015. 东日本MW9.0大地震前、同震及震后地壳水平运动[J]. 武汉大学学报(信息科学版),40(12):1669–1676. Gu G H,Wang W X,Zhan W,Liang H B,Zhu S. 2015. Preseismic,coseismic and postseismic horizontal crustal movements of the MW9.0 Tohoku earthquake in Japan[J]. Geomatics and Information Science of Wuhan University,40(12):1669–1676 (in Chinese).
顾国华. 2017. 2016年日本九州岛7.3级地震前及同震地壳运动[J]. 地震,37(3):28–37. doi: 10.3969/j.issn.1000-3274.2017.03.004 Gu G H,Wang W X. 2017. Preseismic and coseismic crustal movements of the M7.3 Kyushu earthquake on April 16,2016 in Japan[J]. Earthquake Research in China,31(4):589–600.
顾国华,王武星. 2017. 2016年新西兰7.8级大地震GPS观测结果与弹性回跳模型[J]. 武汉大学学报(信息科学版),42(11):1673–1680. Gu G H,Wang W X. 2017. Results of GPS observations for M7.8 earthquake in 2016 in New Zealand and discussion on elastic rebound model[J]. Geomatics and Information Science of Wuhan University,42(11):1673–1680 (in Chinese).
顾国华,王武星. 2019. GPS测得的2018年夏威夷6.9级地震与火山喷发地壳运动[J]. 武汉大学学报(信息科学版),44(8):1191–1197. Gu G H,Wang W X. 2019. Crustal motions observed from GPS observations for the M6.9 earthquake in Hawaii and the eruption of the Kilauea volcano in 2018[J]. Geomatics and Information Science of Wuhan University,44(8):1191–1197 (in Chinese).
Blewitt G,Kreemer C,Hammond M C,Goldfarb J M. 2013. Terrestrial reference frame NA12 for crustal deformation studies in North America[J]. J Geodyn,72:11–24. doi: 10.1016/j.jog.2013.08.004
Blewitt G, Hammond W C, Kreemer C. 2018. Harnessing the GPS data explosion for interdisciplinary science[J/OL]. EOS, 99. doi: 10.1029/2018EO104623.
Gu G H,Meng G J,Wang W X. 2011. Anomalous crustal movements before great Wenchuan earthquake observed by GPS[J]. Geodesy Geodynam,2(2):13–22. doi: 10.3724/SP.J.1246.2011.00013.1
Gu G H,Wang W X. 2011. Far-field crustal movements before and after the 2011 MS9.0 Japan earthquake from GPS observations[J]. Geodesy Geodynam,2(3):1–7. doi: 10.3724/SP.J.1246.2011.00001.2
Gu G H,Wang W X. 2013. Advantages of GNSS in monitoring crustal deformation for detection of precursors to strong earthquakes[J]. Positioning,4:11–19. doi: 10.4236/pos.2013.41003
Wessel P,Smith W H F. 1995. New version of the generic mapping tools[J]. EOS,76(33):329.
-
期刊类型引用(18)
1. 张海洋,毛丰龙,王朝景,刘德强,李博. 2020年唐山古冶5.1级地震前后岩石圈磁场异常变化分析. 地震工程学报. 2024(01): 224-231+240 .  百度学术
百度学术
2. 赵慧琴. 南北地震带历史地震与岩石圈磁场空间分布特征分析. 地震地磁观测与研究. 2024(01): 56-62 . 百度学术
3. 张海洋. 2019年丰南4.5级地震前后岩石圈磁场水平矢量动态演化特征. 中国地震. 2024(02): 426-435 . 百度学术
4. 王朝景,李博,苏树朋. 基于多期累积岩石圈磁场变化分析唐山M_S5.1地震震磁异常. 地震研究. 2024(04): 517-527 . 百度学术
5. 梁霄,储飞,徐如刚,孙鸿博,肖伟鹏,王俊. 2014年霍山M_S4.3地震前后重磁场变化特征及机理分析. 地震地质. 2024(05): 1151-1171 . 百度学术
6. 张海洋,李博,刘德强,王朝景,赵慧琴,毛丰龙,苏树朋. 河北及邻区震前岩石圈磁场异常变化分析. 地震工程学报. 2023(01): 191-198 . 百度学术
7. 刘德强. 长清M4.1地震岩石圈磁场异常特征. 大地测量与地球动力学. 2023(04): 425-428 . 百度学术
8. 刘德强,苏树朋,赵慧琴,昝书林. 山西代县M_S3.0地震地磁异常与构造的关系. 华北地震科学. 2023(01): 66-68+74 . 百度学术
9. 刘德强. 华北中部主要活动断裂对岩石圈磁异常分布的影响. 大地测量与地球动力学. 2022(05): 499-504 . 百度学术
10. 刘德强,云萌,王朝景,李博,张海洋,毛丰龙. 有关小震震前数天震中附近岩石圈磁场Z分量异常特征. 华北地震科学. 2022(02): 77-81 . 百度学术
11. 张海洋,苏树朋,赵慧琴. 2022年青海门源6.9级地震前岩石圈磁场异常变化分析. 地震工程学报. 2022(03): 735-743 . 百度学术
12. 刘德强,王朝景,李博,张海洋,毛丰龙. 地磁台站连续观测分钟值连接阈值选择. 地震地磁观测与研究. 2022(02): 63-70 . 百度学术
13. 张海洋,李博,苏树朋,王朝景,刘德强,赵慧琴,毛丰龙. 张家口—渤海地震带岩石圈磁场时空变化特征. 地震. 2022(01): 133-144 . 百度学术
14. 王朝景,李博,刘德强,张海洋,毛丰龙,苏树朋. 河北及周边地区岩石圈磁场分布与震磁特征. 华北地震科学. 2022(04): 83-87+94 . 百度学术
15. 王朝景,刘德强,苏树朋,李博,张海洋,毛丰龙,赵慧琴. 2018年永清M_(W)4.3地震前后岩石圈磁场变化特征. 地震地磁观测与研究. 2021(03): 129-136 . 百度学术
16. 刘德强,王朝景,李博,张海洋,云萌,毛丰龙. 河北唐山M_S5.1地震岩石圈磁场D分量异常分布和应力的关系. 华北地震科学. 2021(04): 75-79 . 百度学术
17. 刘德强,王朝景,苏树朋,李博,赵慧琴,张海洋,毛丰龙. 华北中部岩石圈磁场变化与岩石圈结构间的关系. 地震地磁观测与研究. 2021(05): 97-102 . 百度学术
18. 王朝景,李博,苏树朋,张海洋,刘德强,赵慧琴,毛丰龙. 2018年冀南地区岩石圈磁场变化分析. 高原地震. 2020(03): 9-12+29 . 百度学术
其他类型引用(1)

 下载:
下载:







计量
- 文章访问数: 1053
- HTML全文浏览量: 456
- PDF下载量: 54
- 被引次数: 19
